'Flavour' of Rotation!
This post is about rotation! Rotation not only drives or describes a large set of actions in the world around us, but also constantly occupies minds of scientists and engineers. As it’s a blog-space for my expression of technically inclined yet lighter thoughts about science, technology, research and art, the topic ‘rotation’ has been on the plate since long. I presume that it would work as a ‘starter’ for many future posts. Indeed, the ‘rotation’ connects many worlds such as physics, mathematics, robotics, biology and so on.
Rotations in A Human Hand
Let’s start with complex systems first. We see with naked eyes or with the help of microscope a rich variety of life performing complex movements by combining multiple swivels and turns around pivots in the body. Take a case of a human sperm. The first observation of the human sperm through a microscope dates back to 17th century and the knowledge that it propels its way by ‘swimming’ by whipping its tail is also old. But, there is a new twist to the understanding! An interested reader may read a recently published work describing how it is way different than the conventional idea of ‘swimming’ that was attributed to it before.
To relate to ‘rotations’ much more easily, the case of human body is a better choice. Patricularly, the mechanism of human hand.
Independent Rotations in A Right-hand Index Finger
I restrict the meaning of the ‘rotation’ to ‘geometric rotation’ for the scope of the post. We grasp and manipulate objects by rotating multiple bones around their pivots (links of bones). I personally get amazed by the complexity of the mechanism in our hand. Let’s decode it step by step. Take index finger of the right hand and observe how many links it has and in how many ways it can rotate. Following three animations describe three of its four independent twists.
It is important to note that the angle of rotation denotes turning away from ‘in-line’ orientation with respect to the neighbouring bone (local reference frame). Also, it is essential to note that the three links are in ‘series’ and an independent manipulation of the angle Theta 2 affects the top part of the finger, while the change in Theta 2 has no effect on the bottom part of the finger. It is important to grasp all the constraints, if you are to make a robotic hand to grasp the objects.
Simultaneous Rotations in the Index Finger
Most of our actions are a combination of multiple rotations. Here, I have made an animation to demonstrate a highly simplified action of striking a cylinder with index finger alone. Note that all the three rotations are in action simultaneously. Please, write to me if you like the animation :D.
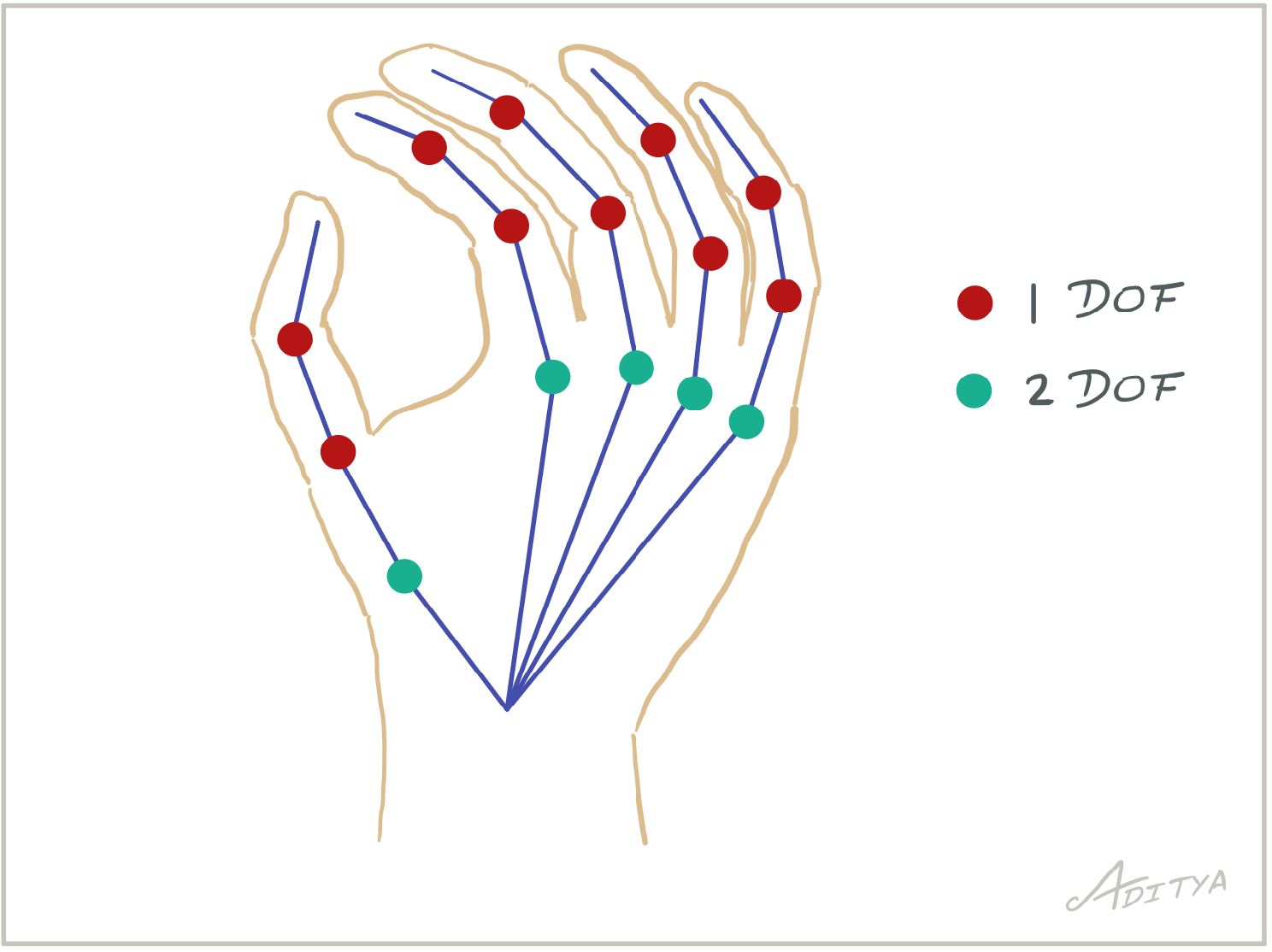
Degrees of Freedom Attached to Human Hand
So far, we have touched upon a highly simplified action. Needless to say, the hand has five fingers, each finger having three links. Besides, all fingers are attached in parallel to a common link. Here, we might wonder, in how many ways we can move our fingers or how many degrees of freedom our hand has. In the following figure, the red dots denote one degree of freedom, while the green dots represent two degrees of freedom. Thus, in total it describes 20 degrees of freedom. However in reality, it has a few more degrees of freedom, but the discussion about it is beyond the scope of the post. Here, I intend to leave the reader with his/her imagination about degrees of freedom attached to the wrist, the elbow, the shoulder, the neck, the hips, the legs and the spine.
Geometric Rotation
A Rotation Matrix
Here in the geometric rotation, we are restricting ourselves to the rotations in which different points of the object rotate in space without changing the ratios of separations between them (in fact, keeping the separations fixed too). This is simillar to considering the bodies to be rigid. To rotate a rigid body along an axis passing through the origin one needs to transform positions (position vectors, {X,Y}) to the new positions (position vectors, {X’,Y’}). A rotation matrix is an operator that operates on {X,Y} to yield {X’,Y’}. You can interact with the following demonstration of rotation matrix in 2D (using a unit circle) by changing the rotation angle Theta with the slider.
Rotation Along an Arbitrary Axis
Naturally, the need arises to rotate objects along an axis passing through a choice of the point in the space. In the interactive example below you can move the origin (the position of the axis) to the point of choice and then check the effect of rotation on the objects.
Simulation of Serial Links akin to the Case of Index Finger
When multiple links and rotations are involved in any assembly, the situation becomes increasingly complex. Consequently, the Rotational transforms need to be understood carefully. Since, we already have looked in to the simulation of index finger, let’s check the interactive analogous example of the assembly having three links in series. Feel free to change three angles with the sliders and see the manifistation. Note that if you replace these three links with the servo motors, you would be able to control the movements by adjusting the angles precisely. Indeed, it would be an automation of the human finger.
Controlling Rotations in Research Lab
At the end, for the readers with a curiosity- ‘How do Researchers orient their specimens precisely and accurately in the hostile and extreme envoirnments during the experiments?’-
Firstly, Researchers are certainly smarter people when it comes to handling rotations and tilts in the experiments (and the cartoon above shouldn’t be taken too seriously :D). Various types of serial, parallel and combination robots are designed, built or procured at research labs to achieve variety of desired motions. Some of such devices are known as Goniometers in the scientific community. Lastly, I express that the discussion on the Goniometers deserves a dedicated blog-post in future and I stop at this note here.
- Rotation_matrix
- Article Link- Human sperm uses asymmetric and anisotropic flagellar controls to regulate swimming symmetry and cell steering
- Goniometer
- Human Anatomy with Wolfram Technologies